About
Currently working hands on with robotic manipulators in Unity3D/ROS2 ecosystem, for my thesis "Digital Twin Based Robotic Maintainance" particularly Aircraft and Spacecraft maintenance I've worked 2 years as a Big Data Engineer, writing pipelines resilient to replication delays and Spark cluster failures.
Projects
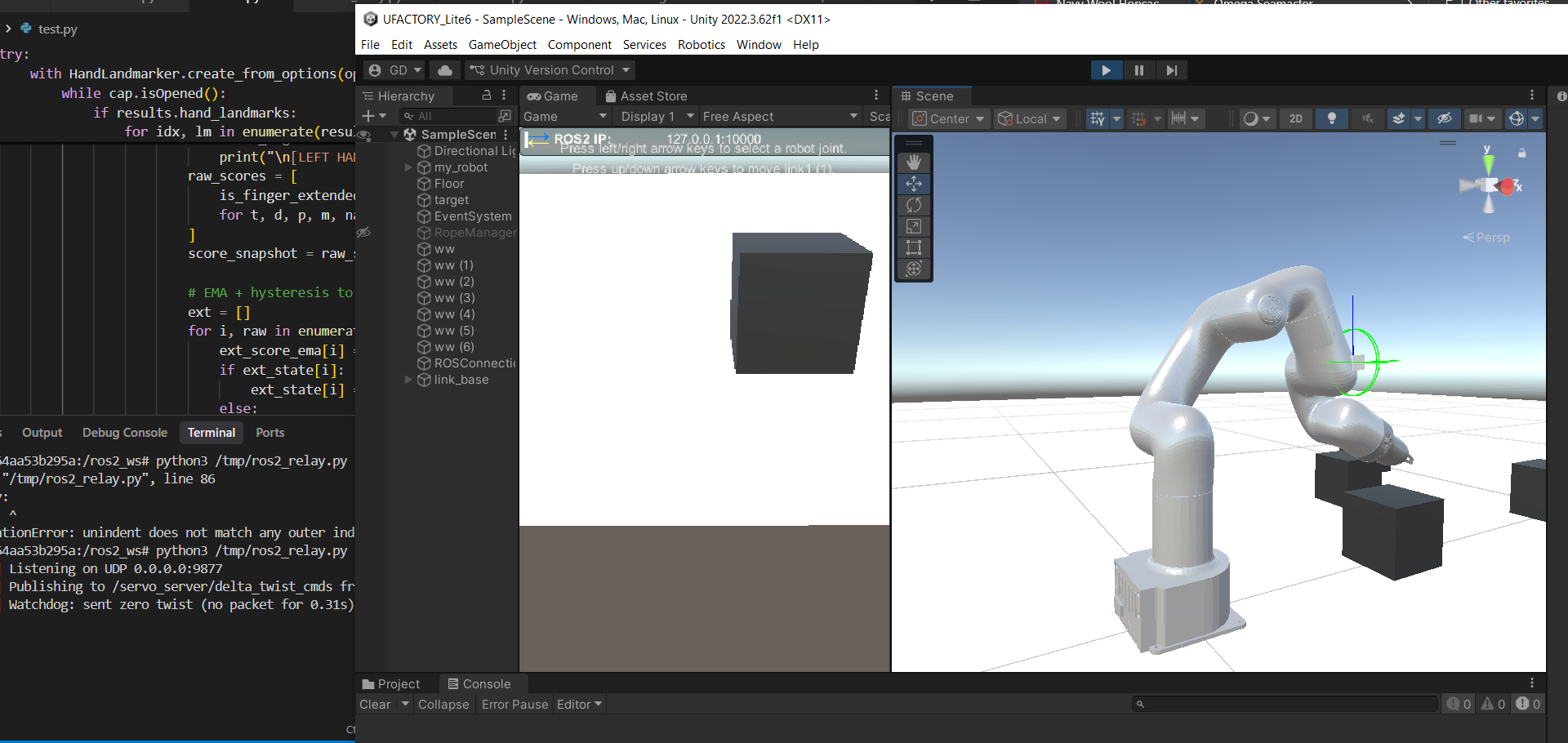
Integrating Moveit2 and Unity3D
Connecting MoveIt2 Servo Control with Unity3D Articulation Drive for Ufactory Lite6 manipulator
ROS2, Moveit2, Unity3D, Python
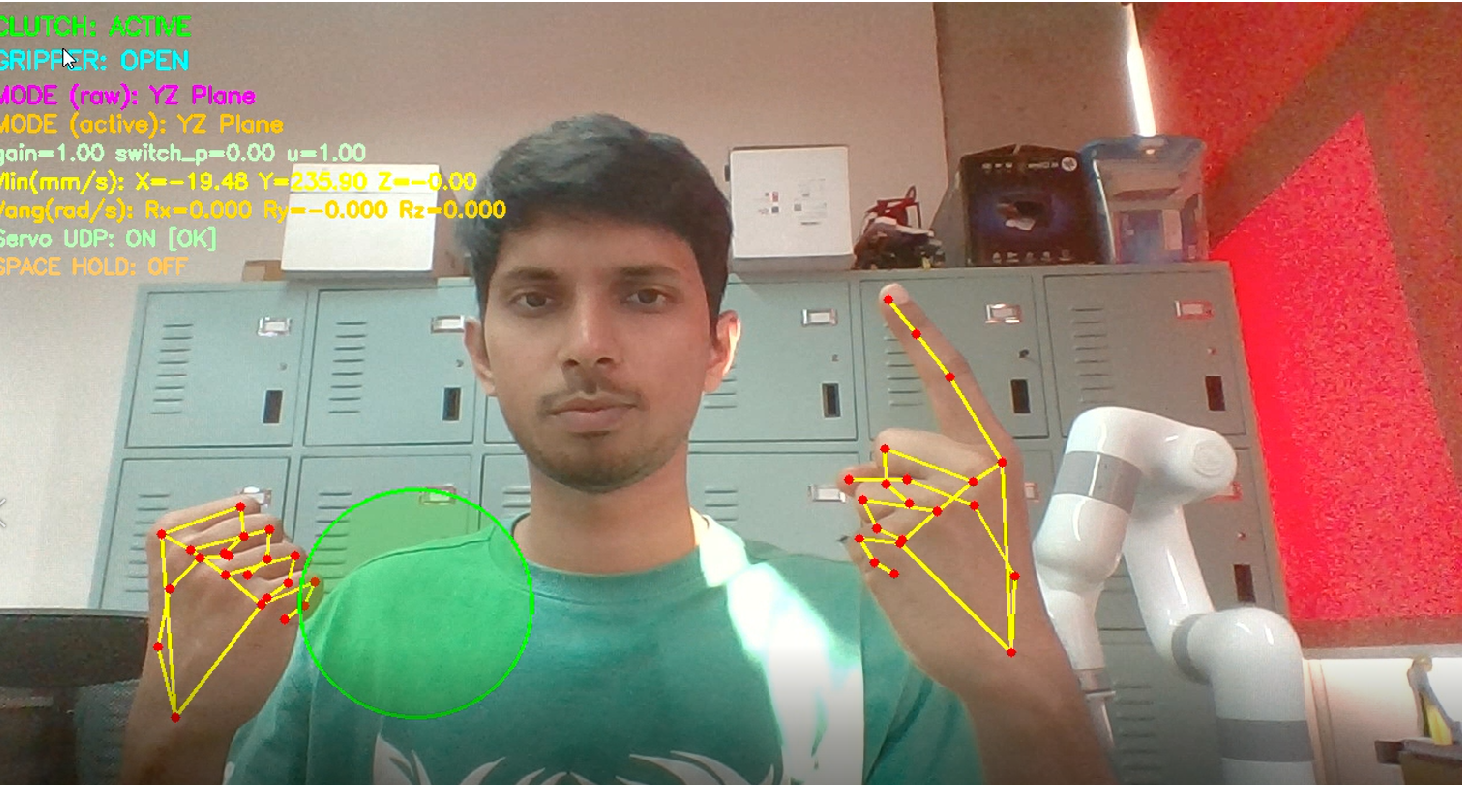
Gesture based teleop for UFactory Lite 6
Using google mediapipe to get hand landmarks ratio & mapping them to End Effector Rate Control
OpenCV, GoogleMediaPipe, ROS2, Moveit2, Unity3D, xArmLite6
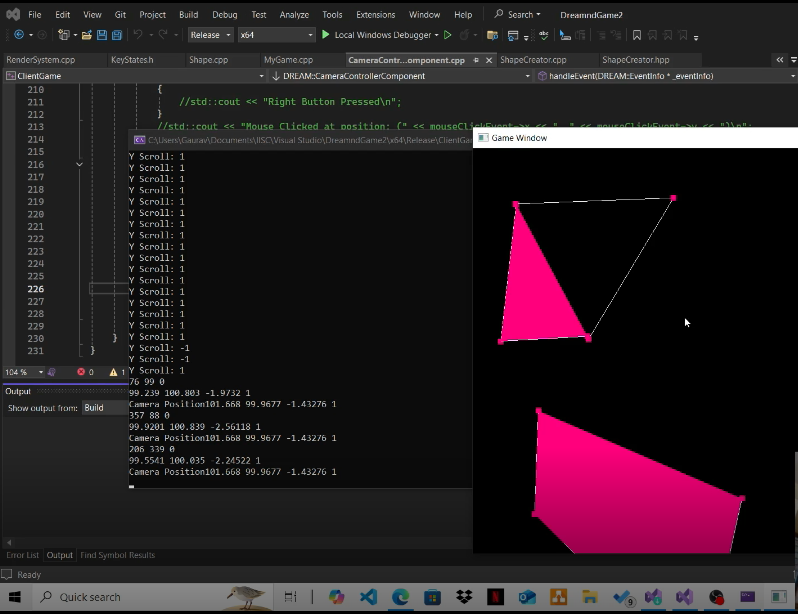
Entity Component System (ECS) based game engine in C++/OpenGL with Lua Scripting Support
Basic event based(Observer Pattern) 3D Game engine. .
C++,OpenGL,GLAD,GLFW,Lua Scripting
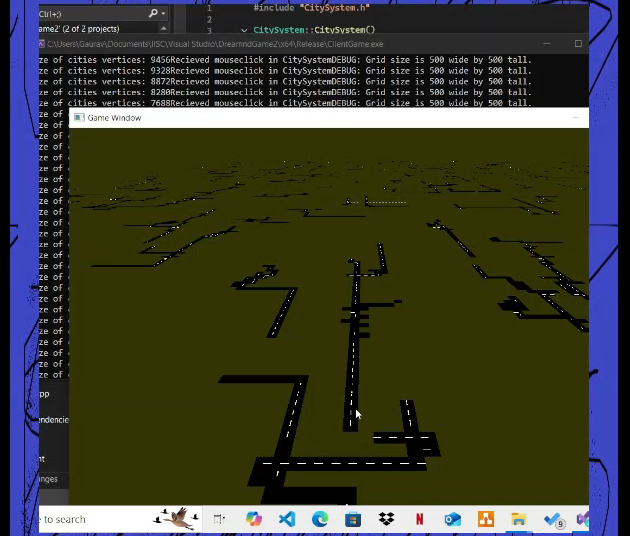
OpenGL CPP Rendering Engine with procedural City Road Generation
Built a lightweight Entity Component System (ECS) engine with render, camera, physics, and event systems; OpenGL pipeline with VAO/VBO per entity and GLSL shader management.
MoveIt, Python
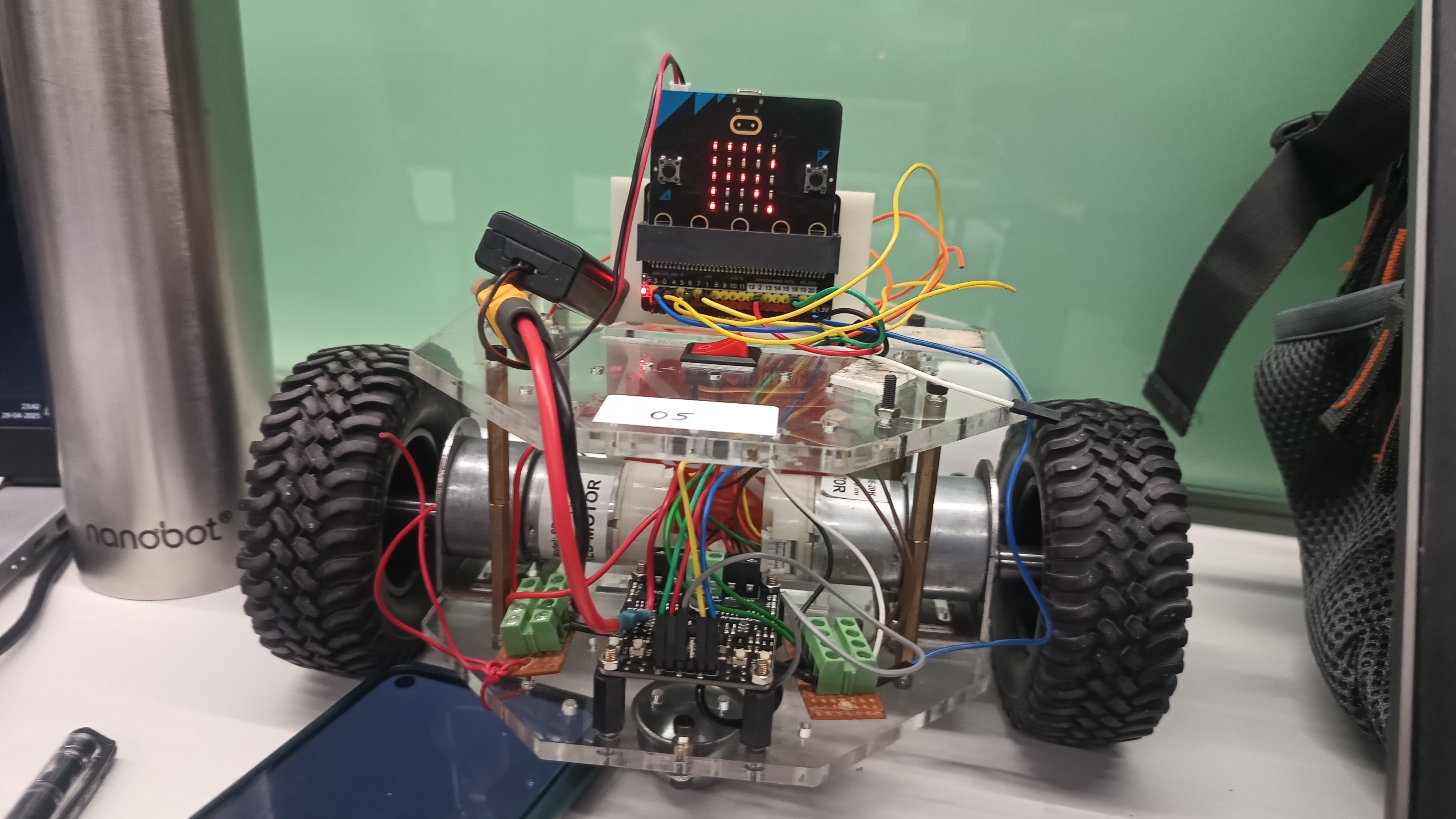
Multi-Robot Rescue System on BBC micro:bit (nRF52833)
Built a lightweight Entity Component System (ECS) engine with render, camera, physics, and event systems; OpenGL pipeline with VAO/VBO per entity and GLSL shader management.
MoveIt, Python
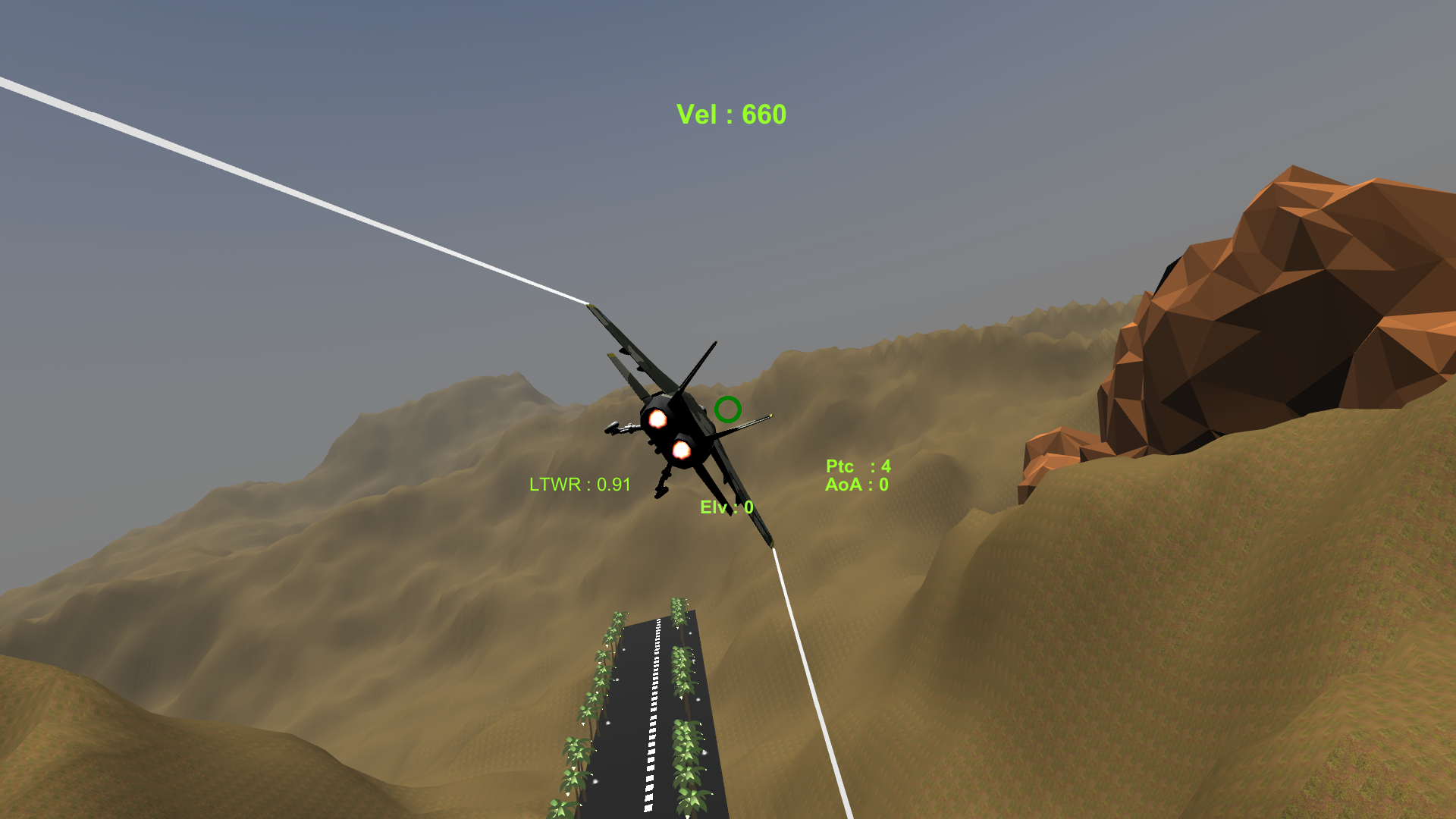
Physics accurate Flight Simulator in Unity3D
This was a physics accurate flight sim which I wrote for my Bachelors Thesis. It's writtein in Unity 3D and mirrors physical characterists of an F22 raptor. in terms of weight and thrust. The aircraft has many control surfaces and each control surface contributes of lift/drag/moment independently.
C#, Unity3D
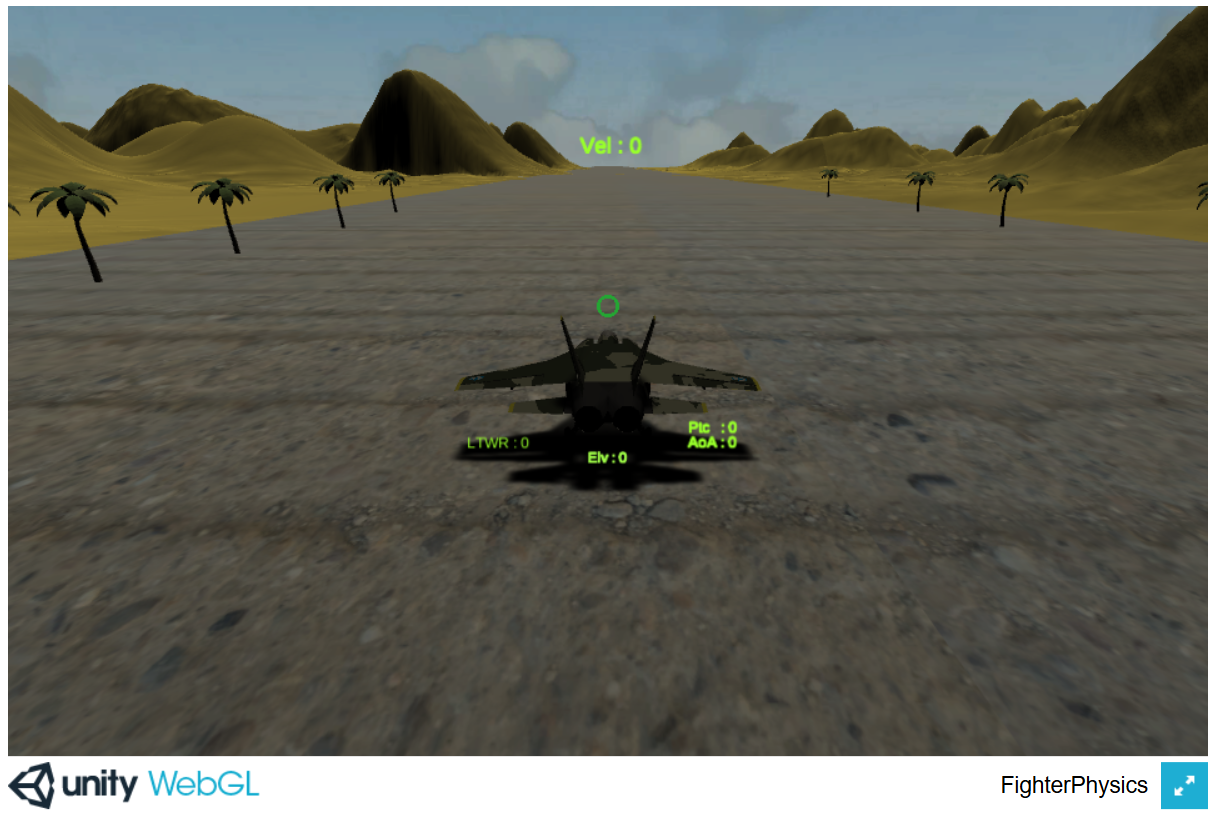
Prototype 3D Flight Sim on Unity3D WebGL
This was a prototype of a full blown physics accurate flight sim which I wrote for my Bachelors Thesis.
MoveIt, Python
Courses
- Machine Learning for Cyber Physical Systems (PG)
- Real Time Embedded Systems (PG)
- Design of Cyber Physical Systems (PG)
- Motion Planning for Autonomous Systems (PG)
- Navigation Guidance and Control (PG)
- Applied Linear and Non Linear Control (PG)
- Compiler Design (PG)
- Foundation Of Robotics (PG)
- Intelligent User Interface (PG)