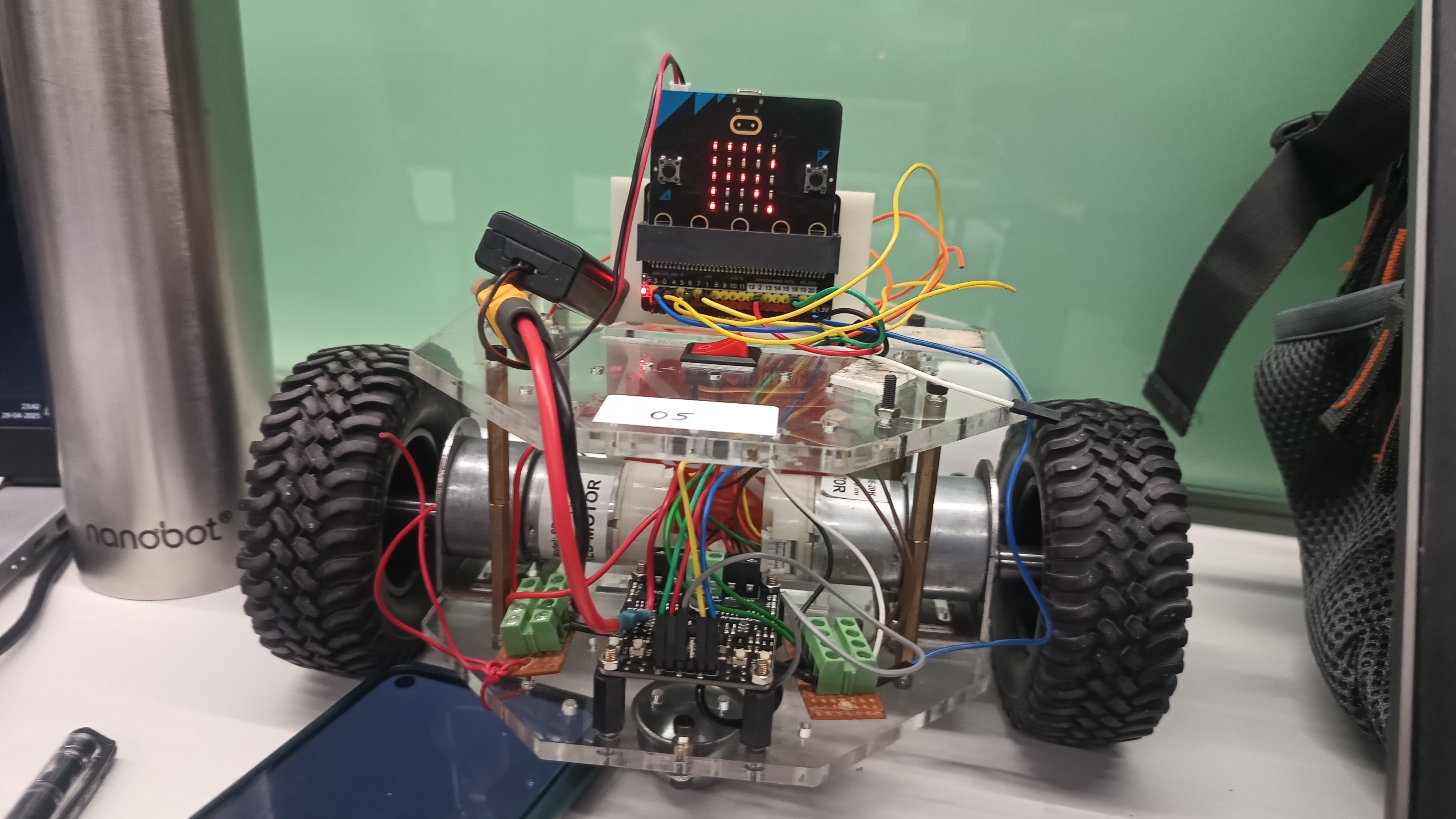
Multi-Robot Rescue System on BBC micro:bit (nRF52833)
Using two wheeled robots , where first one goes out as an explorer by recieving radio commands and then is not able to come back due to
loss of radio communication.
This loss of comms is detected by lack of heartbeat signal which was being continously recieved from explorer,
This triggers the hand held BBC Microbit to upload all the gesture commands which were sent to first bot, to be uploaded into second Rescue bot,
which will go out along the same path and establish radio contact with lost Explorer.
Full setup, prerequisites, usage steps, and troubleshooting: GitHub project page