Integrating Moveit2 and Unity3D
Connecting MoveIt2 Servo Control with Unity3D Articulation Drive for Ufactory Lite6 manipulator
This setup is a precursor to the Precise gesture based teleop of Xarm Lite6
Unity3D has limited out of the box support for robotics setup, but the minimal package allows us to listen and subscribe to ROS2 services and actions.
The primary AIM here was to send end effector velocities and rotation commands [EE_x,EE_y,EE_z,EE_Rx,EE_Ry,EE_Rz] to moveit2 servo stack
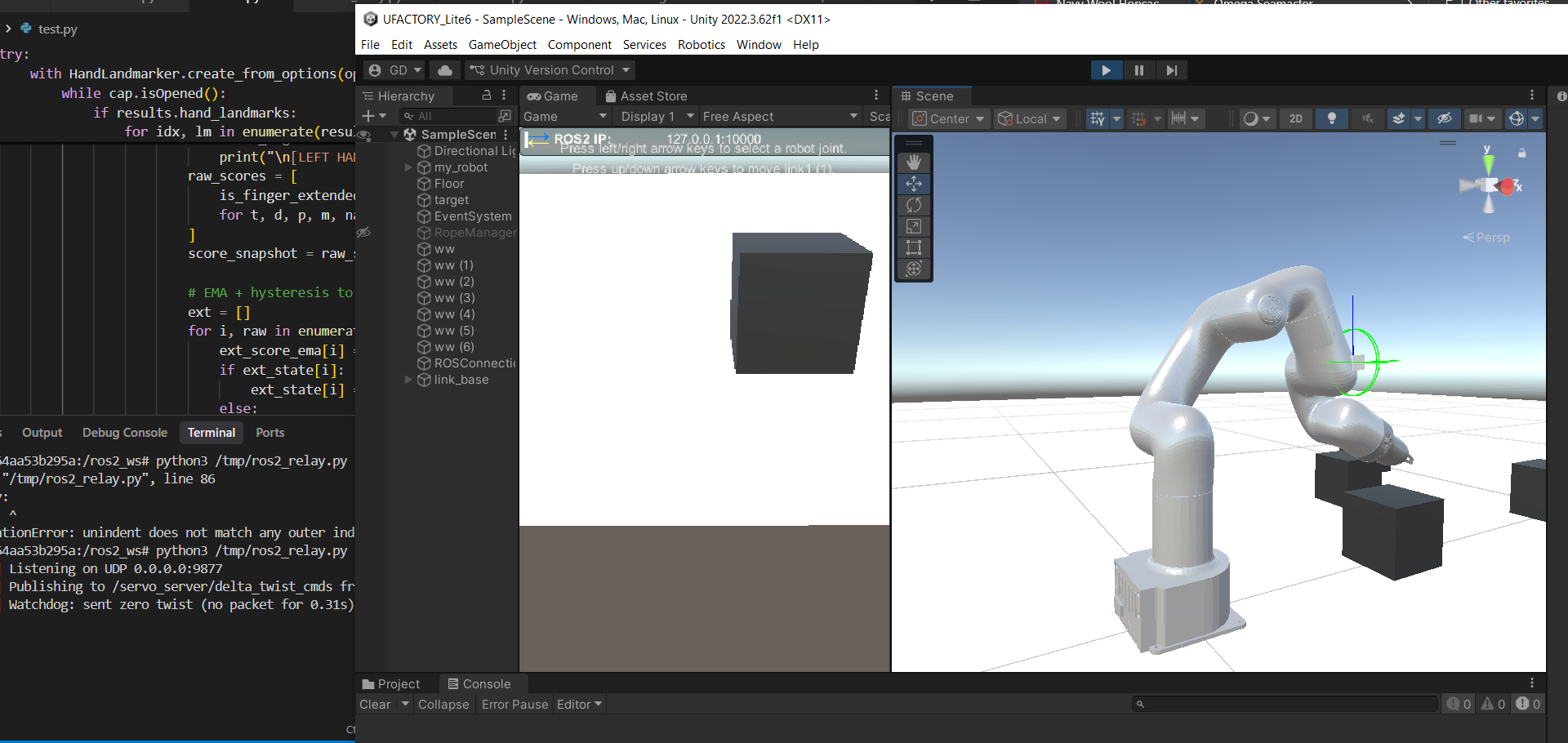
and have it render the robot in Unity3D in real time.
Unity instance here is used for pure rendering. It's subscribed to /Joint_States topic and just renders the joint angles.
Full setup, prerequisites, usage steps, and troubleshooting: GitHub project page